Robotics Competition - Aztech Challenge
2.007 Robotics Competition - Aztech Challenge
- Objectives:
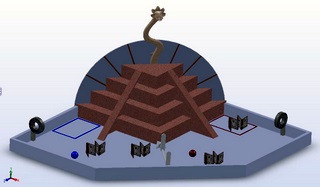
- Place the codices (booklets) on top of the pyramid - higher levels for more points.
- Put the ball through the hoop.
- Pull the lever to move the serpent for a multiplier bonus.
- Constraints:
- Wheeled robots may not cross the field's half way point.
- Robots may hold a maximum of one codex at the start of the competition.
- Each match runs for 90 seconds: 15 seconds of autonomous mode followed by 75 seconds of radio control.
- The codices and ball may be arranged on the field by the operator as long as they begin at a minimum distance from the robot.
- In the event of a tie, the lighter robot wins.
Forming Concepts & Brainstorming
- After the contest was announced, time was given for brainstorming and bench level testing to develop strategies.
- Should the robot:
- Be heavy and immovable or light and fast?
- Be light enough to win the tie breaker?
- Go for scoring the ball and both codices, a combination of game pieces, or just one game piece?
- Try to pull the mulitplier, block it, or ignore it?
- Have wheels or cross to the other side of the field?
Strategy & Overall Concept
- During setup, place the two codices next to each other on the field.
- During autonomous, drive towards the lever and straddle it with the robot.
- Make sure the robot is aligned properly with the lever; otherwise, don't drive the robot base during teleoperation.
- Once radio control is activated, lower the lever actuator onto the lever and begin pulling.
- Swing the arm to pick up both codices and flip it over the robot to place onto the pyramid.
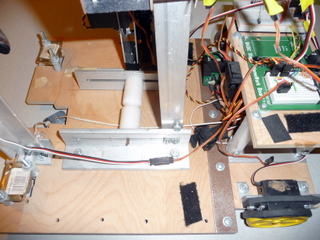
Drive Base & Control
- A simple base was constructed for balance and a wide wheel base.
- The robot was meant to be heavy to win in a pulling match.
- Basic stamp for autonomous mode integrated with the radio control system for teleoperation.
- Design Successes:
- Heavy, immovable robot that could not be lifted by the opponent pulling on the lever.
- Easily controllable.
- Large base provided lots of room for mounting components and compensated for the high center of mass to prevent flipping.
- Design Drawbacks:
- Slow movement.
- Difficult/unreliable autonomous control - hard to switch from radio to basic stamp.
- Difficult to calibrate shared radio controller prior to every match.
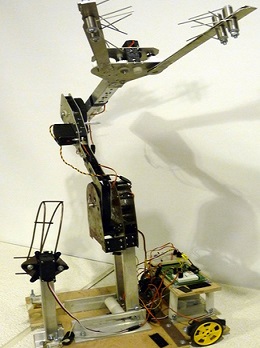
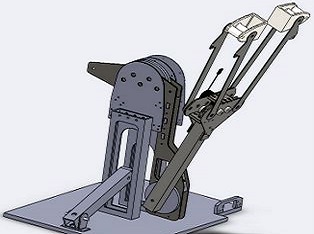
Arm
- Almost all parts for the 3 jointed arm was drawn in SolidWorks and cut out on the waterjet, inlcuding the metal plates, plastic connectors, and majority of the gears.
- Length of arm allowed it to grab the codices and not have to move the base to reach the pyramid.
- Spring 'teeth' to grab onto codices.
- Simple path of travel for the arm.
- Design Successes:
- Easy arm assembly and simple flipping procedure for starting on different sides of the competition board.
- Very strong arm that allowed for long reach.
- Gripper held codices well.
- Design Drawbacks:
- Coordinating the number of joints made the arm slightly challenging to control with the rc controller - required calibration and hard stops.
- Took a long time to have the parts cut on the waterjet due to heavy class use.
- Created a high center of mass on the robot.
- Gripper sometimes had difficulty keeping codices aligned.
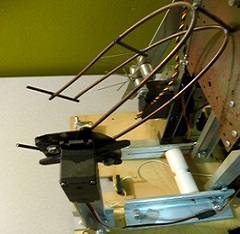
Lever Puller
- Welded cage that drops over the lever - prevents anyone else from pulling the lever.
- A lasso inside the cage was drawn tight and pulled the lever down.
- A powerful motor and high reduction created a high torque that pulled the lever down in 30 seconds.
- Design Successes:
- Simple guidance and quick initiation since the lasso compensated for inprecise alignment.
- The high force from the gearbox and high mass of the robot prevented the robot from being outpulled via the other lever.
- The welded cage prevented the opponent from grabbing onto the same lever.
- Design Drawbacks:
- Weak spot welds.
- The lasso sometimes slipped slightly down the lever body and caused a large increase in the necessary force to pull.

Competition
- Calibration issues with the competition controller caused the lasso mechanism to activate early and pull the cage prematurely, resulting in the spot welds breaking on the cage.
- The cage flew into the arm and got tangled in the gripper.
- The robot still scored two points by placing a codex onto the second level of the pyramid (with the cage still stuck on the gripper) to win the match.